Linza bosh nuri burchagi optik o'q va linza bosh nuri orasidagi burchakdir. Linza bosh nuri optik tizimning diafragma to'xtashi va kirish ko'z qorachig'i markazi va obyekt nuqtasi orasidagi chiziqdan o'tadigan nurdir. Tasvir sensorida CRA mavjudligining sababi shundaki, Tasvir sensori yuzasida Mirco linzasida FOV (ko'rish maydoni) mavjud va CRA qiymati Tasvir sensorining mikro linzasi va kremniy fotodiodining joylashuvi o'rtasidagi gorizontal xato qiymatiga bog'liq. Maqsad linzani yaxshiroq moslashtirishdir.
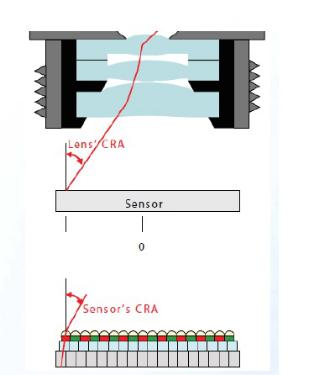
Linzaning bosh nurlanish burchagi
Mos keladigan Lens&Image Sensor CRA ni tanlash fotonlarning kremniy fotodiodlariga aniqroq tushirilishini ta'minlaydi va shu bilan optik o'zaro ta'sirni kamaytiradi.
Kichik pikselli tasvir sensorlari uchun asosiy nurlanish burchagi muhim parametrga aylandi. Buning sababi, yorug'lik pikselning pastki qismidagi kremniy fotodiodiga yetib borishi uchun piksel chuqurligidan o'tishi kerak, bu esa fotodiodga to'g'ridan-to'g'ri kiradigan yorug'lik miqdorini maksimal darajada oshirishga yordam beradi va qo'shni pikselning kremniy fotodiodiga kiradigan yorug'lik miqdorini kamaytiradi (Optik o'zaro ta'sirni yaratish).
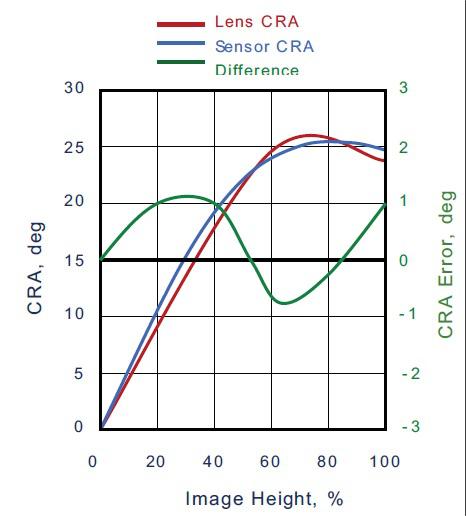
Shuning uchun, tasvir sensori linzani tanlaganda, u tasvir sensori ishlab chiqaruvchisi va linza ishlab chiqaruvchisidan moslashtirish uchun CRA egri chizig'ini so'rashi mumkin; odatda tasvir sensori va linza o'rtasidagi CRA burchak farqi +/- 3 daraja ichida boshqarilishi tavsiya etiladi, albatta, piksel qanchalik kichik bo'lsa, talab shunchalik yuqori bo'ladi.
Ob'ektiv CRA va sensor CRA mos kelmasligining ta'siri:
Mos kelmaslik o'zaro ta'sirga olib keladi, natijada tasvir bo'ylab ranglar nomutanosibligi yuzaga keladi, bu esa signal-shovqin nisbati (SNR) ning pasayishiga olib keladi; chunki CCM fotodioddagi signal yo'qotilishini qoplash uchun raqamli kuchaytirishni oshirishni talab qiladi.
Ob'ektiv CRA va sensor CRA mos kelmasligining ta'siri
Agar CRA mos kelmasa, bu xira tasvirlar, tuman, past kontrast, xira ranglar va maydon chuqurligining pasayishi kabi muammolarga olib keladi.
CRA linzasi Image Sensor CRA rang soyasini ishlab chiqaradiganidan kichikroq.
Agar Tasvir Sensori linzaning CRA qiymatidan kichikroq bo'lsa, linza soyalanishi sodir bo'ladi.
Shunday qilib, avvalo, rang soyasi ko'rinmasligiga ishonch hosil qilishimiz kerak, chunki linza soyasini rang soyasiga qaraganda nosozliklarni tuzatish orqali hal qilish osonroq.
Tasvir sensori va CRA linzalari
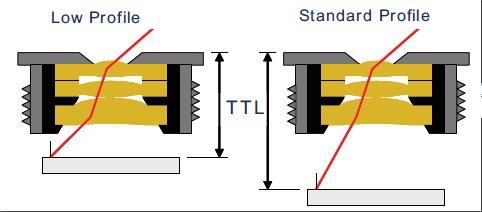
Yuqoridagi rasmdan ko'rinib turibdiki, linzaning TTL qiymati CRA burchagini aniqlashda ham kalit hisoblanadi. TTL qanchalik past bo'lsa, CRA burchagi shuncha katta bo'ladi. Shuning uchun, kamera tizimini loyihalashda kichik pikselli tasvir sensori linzaning CRA mosligi uchun ham juda muhimdir.
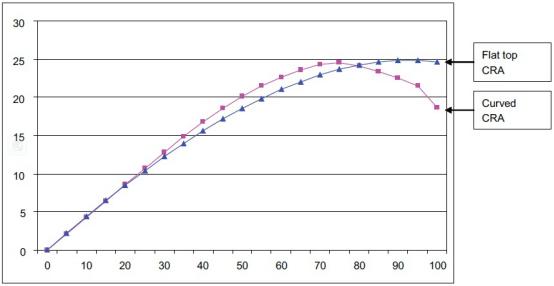
Ko'pincha, turli sabablarga ko'ra, linza CRA tasvir sensori CRA ga to'liq mos kelmaydi. Eksperimental ravishda kuzatilishicha, tekis tepaga (minimal burilish) ega bo'lgan linza CRA egri chiziqlari egri CRA larga qaraganda kamera moduli yig'ish o'zgarishlariga ko'proq bardoshlidir.
Turli sabablarga ko'ra CRA linzasi tasvir sensori CRA ga to'liq mos kelmaydi
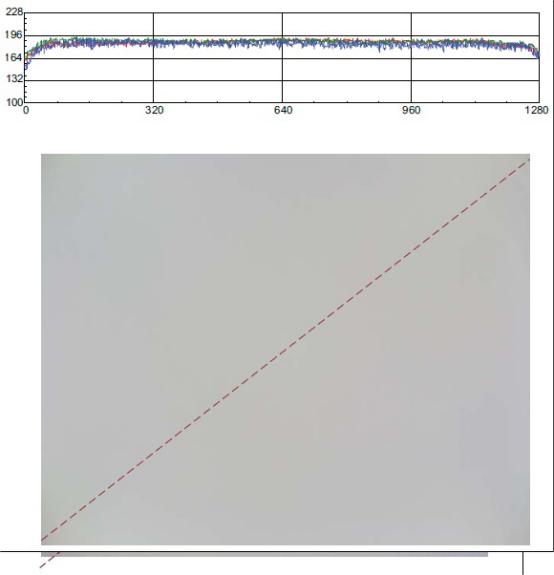
Quyidagi rasmlarda tekis tepalikli va egri CRAlarning namunalari ko'rsatilgan.
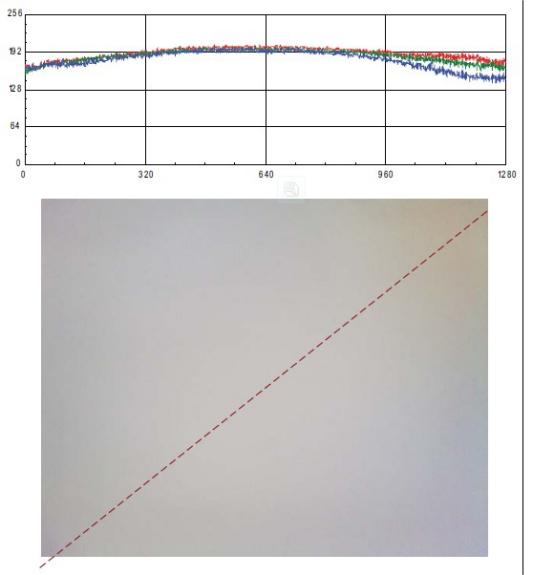
Yassi tepa va egri CRAlarga misollar
Agar linzaning CRA qiymati tasvir sensorining CRA qiymatidan juda farq qilsa, rang sxemasi quyidagi rasmda ko'rsatilgandek ko'rinadi.
Ranglar to'plami paydo bo'ladi
Joylashtirilgan vaqt: 2023-yil 5-yanvar


