Linsens hovedstrålevinkel er vinkelen mellom den optiske aksen og linsens hovedstråle. Linsens hovedstråle er strålen som passerer gjennom blenderåpningen til det optiske systemet og linjen mellom inngangspupillens sentrum og objektpunktet. Årsaken til eksistensen av CRA i bildesensoren er at det er et FOV (synsfelt) på mikrolinsen på overflaten av bildesensoren, og verdien av CRA avhenger av en horisontal feilverdi mellom mikrolinsen på bildesensoren og posisjonen til silisiumfotodioden. Formålet er å bedre tilpasse linsen.
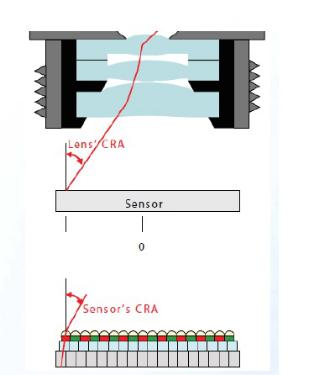
Linsens hovedstrålevinkel
Å velge en matchende CRA eller linse og bildesensor kan sikre mer nøyaktig fangst av fotoner i silisiumfotodioder, og dermed redusere optisk krysstale.
For bildesensorer med små piksler har hovedstrålevinkelen blitt en viktig parameter. Dette er fordi lyset må gå gjennom dybden av pikselet for å nå silisiumfotodioden nederst på pikselet, noe som bidrar til å maksimere mengden lys som går rett inn i fotodioden og reduserer mengden lys som går inn i silisiumfotodioden til en tilstøtende piksel (Opprette optisk krysstale).
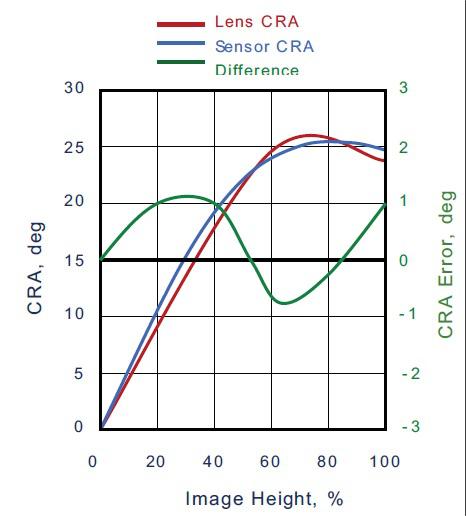
Derfor, når en bildesensor velger et objektiv, kan den be bildesensorprodusenten og objektivprodusenten om en CRA-kurve for samsvar. Det anbefales generelt at CRA-vinkelforskjellen mellom bildesensoren og objektivet kontrolleres innenfor +/- 3 grader. Jo mindre pikselet er, desto høyere er kravet selvfølgelig.
Effekter av misforhold mellom linse-CRA og sensor-CRA:
Feil samsvar resulterer i krysstale som igjen fører til fargeubalanse i bildet, noe som resulterer i en reduksjon i signal-til-støy-forholdet (SNR), ettersom CCM krever økt digital forsterkning for å kompensere for signaltap i fotodioden.
Effekter av uoverensstemmelse mellom linse-CRA og sensor-CRA
Hvis CRA-en ikke samsvarer, vil det føre til problemer som uskarpe bilder, tåke, lav kontrast, falmede farger og redusert dybdeskarphet.
Linsens CRA er mindre enn det bildesensorens CRA vil produsere fargeskyggelegging.
Hvis bildesensoren er mindre enn objektivets CRA, vil det oppstå linseskyggelegging.
Så må vi først sørge for at fargeskyggelegging ikke vises, fordi linseskyggelegging er enklere å løse gjennom feilsøking enn fargeskyggelegging.
Bildesensor og linse CRA
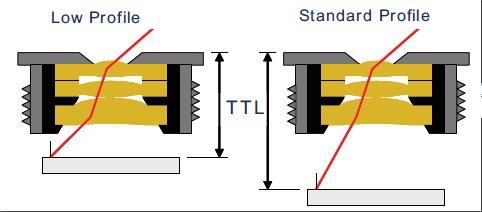
Det fremgår av figuren ovenfor at TTL-en til objektivet også er nøkkelen til å bestemme CRA-vinkelen. Jo lavere TTL, desto større CRA-vinkel. Derfor er bildesensoren med små piksler også svært viktig for objektivets CRA-tilpasning når man designer kamerasystemet.
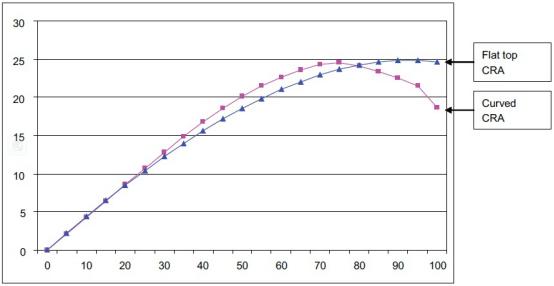
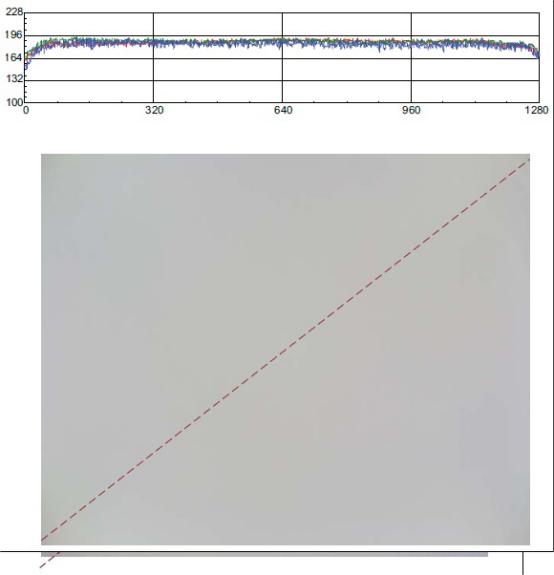
Ofte samsvarer ikke linsens CRA nøyaktig med bildesensorens CRA av ulike årsaker. Det har blitt observert eksperimentelt at linsens CRA-kurver med en flat topp (minimum flip) er mer tolerante for variasjoner i kameramodulmonteringen enn buede CRA-er.
Objektivets CRA samsvarer ikke nøyaktig med bildesensorens CRA av forskjellige årsaker.
Bildene nedenfor viser eksempler på CRA-er med flat topp og buede topper.
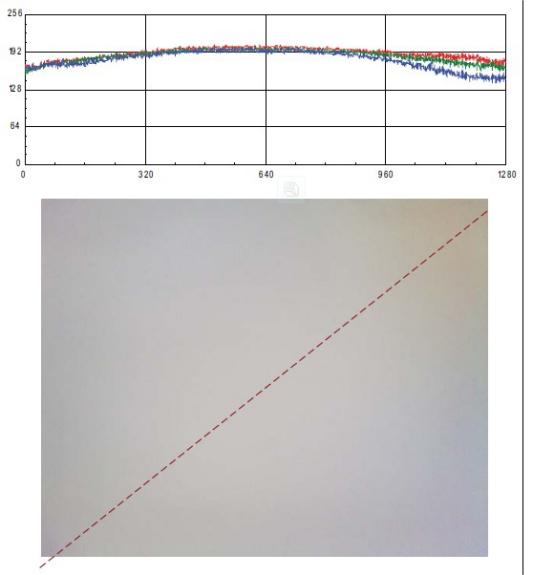
Eksempler på flate topp- og buede CRA-er
Hvis objektivets CRA er for forskjellig fra bildesensorens CRA, vil fargeskjæret se ut som vist på bildet nedenfor.
Fargeskjæret vises
Publisert: 05.01.2023


