ლინზის მთავარი სხივის კუთხე არის კუთხე ოპტიკურ ღერძსა და ლინზის მთავარ სხივს შორის. ლინზის მთავარი სხივი არის სხივი, რომელიც გადის ოპტიკური სისტემის დიაფრაგმის საკეტსა და შესასვლელი გუგის ცენტრსა და ობიექტის წერტილს შორის ხაზში. გამოსახულების სენსორში CRA-ს არსებობის მიზეზი ის არის, რომ Mirco ლინზას გამოსახულების სენსორის ზედაპირზე აქვს ხედვის არე (FOV) და CRA-ს მნიშვნელობა დამოკიდებულია გამოსახულების სენსორის მიკროლინზასა და სილიკონის ფოტოდიოდის პოზიციას შორის ჰორიზონტალური შეცდომის მნიშვნელობაზე. მიზანია ლინზის უკეთ შეხამება.
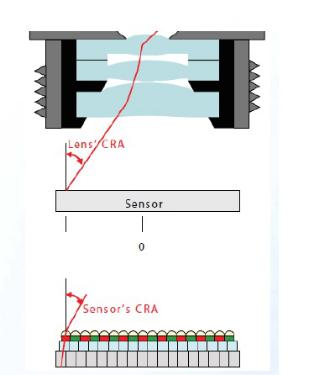
ლინზის მთავარი სხივის კუთხე
ლინზისა და გამოსახულების სენსორის შესაბამისი CRA-ს არჩევა უზრუნველყოფს ფოტონების უფრო ზუსტ ჩაწერას სილიკონის ფოტოდიოდებში, რითაც ამცირებს ოპტიკური ჯვარედინი ურთიერთქმედებას.
პატარა პიქსელების მქონე გამოსახულების სენსორებისთვის, მთავარი სხივის კუთხე მნიშვნელოვან პარამეტრად იქცა. ეს იმიტომ ხდება, რომ სინათლემ პიქსელის სიღრმე უნდა გაიაროს, რათა პიქსელის ქვედა ნაწილში მდებარე სილიკონის ფოტოდიოდამდე მიაღწიოს, რაც ხელს უწყობს ფოტოდიოდში შემავალი სინათლის რაოდენობის მაქსიმიზაციას და ამცირებს მიმდებარე პიქსელის სილიკონის ფოტოდიოდში შემავალი სინათლის რაოდენობას (ოპტიკური ჯვარედინი დიალოგის შექმნა).
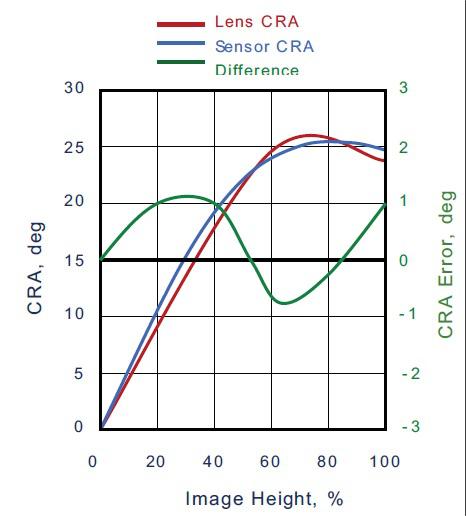
ამიტომ, როდესაც გამოსახულების სენსორი ირჩევს ლინზას, მას შეუძლია მოსთხოვოს გამოსახულების სენსორის მწარმოებელს და ლინზის მწარმოებელს CRA მრუდის შესაბამისობა; ზოგადად რეკომენდებულია, რომ გამოსახულების სენსორსა და ლინზას შორის CRA კუთხის სხვაობა კონტროლდებოდეს +/-3 გრადუსის ფარგლებში, რა თქმა უნდა, რაც უფრო პატარაა პიქსელი, მით უფრო მაღალია მოთხოვნა.
ლინზის CRA-სა და სენსორის CRA-ს შეუსაბამობის ეფექტები:
შეუსაბამობა იწვევს ფერთა დისბალანსს მთელ გამოსახულებაში, რაც იწვევს სიგნალ-ხმაურის თანაფარდობის (SNR) შემცირებას; რადგან CCM მოითხოვს ციფრული გაძლიერების გაზრდას ფოტოდიოდში სიგნალის დანაკარგის კომპენსაციისთვის.
ლინზის CRA-სა და სენსორის CRA-ს შეუსაბამობის ეფექტები
თუ CRA არ შეესაბამება, ეს გამოიწვევს ისეთ პრობლემებს, როგორიცაა ბუნდოვანი სურათები, ნისლი, დაბალი კონტრასტი, გაცვეთილი ფერები და ველის სიღრმის შემცირება.
ლინზის CRA უფრო პატარაა, ვიდრე გამოსახულების სენსორის CRA-ს მიერ წარმოქმნილი ფერის დაჩრდილვა.
თუ გამოსახულების სენსორი ლინზის CRA-ზე პატარაა, ლინზის დაჩრდილვა მოხდება.
ამიტომ, პირველ რიგში უნდა დავრწმუნდეთ, რომ ფერის დაჩრდილვა არ გამოჩნდება, რადგან ლინზის დაჩრდილვის მოგვარება გამართვით უფრო ადვილია, ვიდრე ფერის დაჩრდილვის.
გამოსახულების სენსორი და ლინზა CRA
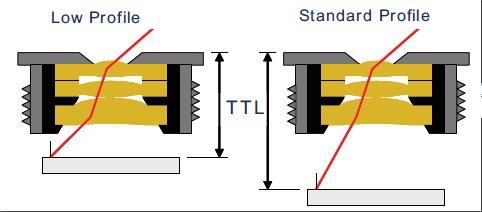
ზემოთ მოცემული სურათიდან ჩანს, რომ ლინზის TTL ასევე წარმოადგენს CRA კუთხის განსაზღვრის გასაღებს. რაც უფრო დაბალია TTL, მით უფრო დიდია CRA კუთხე. ამიტომ, პატარა პიქსელების მქონე გამოსახულების სენსორი ასევე ძალიან მნიშვნელოვანია ლინზის CRA-ს შესატყვისად კამერის სისტემის დიზაინის შექმნისას.
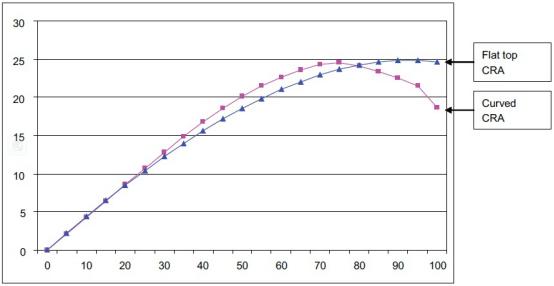
ხშირად, ლინზის CRA სხვადასხვა მიზეზის გამო ზუსტად არ ემთხვევა გამოსახულების სენსორის CRA-ს. ექსპერიმენტულად დაფიქსირდა, რომ ბრტყელი ზედაპირის მქონე (მინიმალური გადაბრუნება) ლინზის CRA-ს მოხრილი ფორმები უფრო ტოლერანტულია კამერის მოდულის აწყობის ვარიაციების მიმართ, ვიდრე მოხრილი CRA-ები.
ლინზის CRA სხვადასხვა მიზეზის გამო ზუსტად არ ემთხვევა გამოსახულების სენსორის CRA-ს.
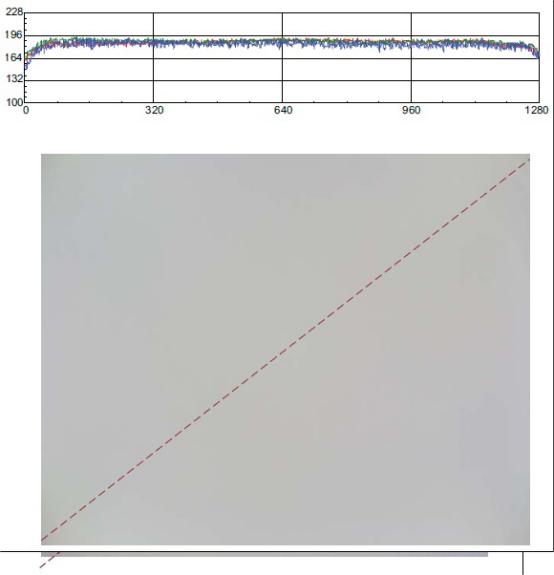
ქვემოთ მოცემულ სურათებზე ნაჩვენებია ბრტყელი და მოხრილი CRA-ების მაგალითები.
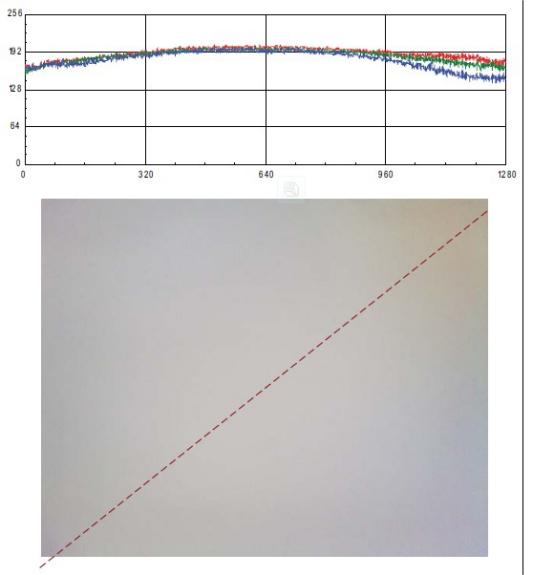
ბრტყელი ზედა და მოხრილი CRA-ს მაგალითები
თუ ლინზის CRA ძალიან განსხვავდება გამოსახულების სენსორის CRA-სგან, ფერების გამრავალფეროვნება გამოჩნდება ქვემოთ მოცემულ სურათზე ნაჩვენების მსგავსად.
ფერების კასტი გამოჩნდება
გამოქვეყნების დრო: 2023 წლის 5 იანვარი


