Լինզայի գլխավոր ճառագայթի անկյունը օպտիկական առանցքի և լինզայի գլխավոր ճառագայթի միջև եղած անկյունն է: Լինզայի գլխավոր ճառագայթը այն ճառագայթն է, որն անցնում է օպտիկական համակարգի ապերտուրայի կանգառով և մուտքի բիբի կենտրոնի ու օբյեկտի կետի միջև ընկած գծով: Պատկերի սենսորում CRA-ի գոյության պատճառն այն է, որ Mirco լինզայի վրա պատկերի սենսորի մակերեսին կա FOV (տեսադաշտ), և CRA-ի արժեքը կախված է պատկերի սենսորի միկրո լինզայի և սիլիցիումային ֆոտոդիոդի դիրքի միջև հորիզոնական սխալի արժեքից: Նպատակն է ավելի լավ համապատասխանեցնել լինզային:
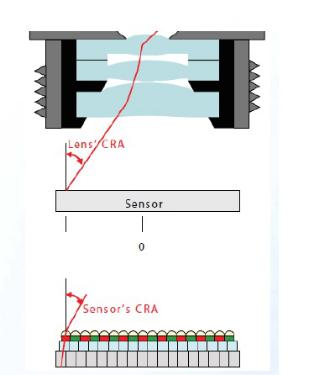
Լինզայի գլխավոր ճառագայթի անկյունը
Համապատասխան Lens&Image Sensor-ի CRA-ի ընտրությունը կարող է ապահովել ֆոտոնների ավելի ճշգրիտ գրանցում սիլիցիումային ֆոտոդիոդների մեջ, այդպիսով նվազեցնելով օպտիկական խաչաձև շփումը։
Փոքր պիքսելներով պատկերի սենսորների համար գլխավոր ճառագայթի անկյունը դարձել է կարևոր պարամետր։ Դա պայմանավորված է նրանով, որ լույսը պետք է անցնի պիքսելի խորությամբ՝ պիքսելի ներքևի մասում գտնվող սիլիկոնային ֆոտոդիոդին հասնելու համար, ինչը օգնում է մեծացնել ֆոտոդիոդ մտնող լույսի քանակը և նվազեցնում է հարակից պիքսելի սիլիկոնային ֆոտոդիոդ մտնող լույսի քանակը (օպտիկական խաչաձև խոսակցությունների ստեղծում):
Հետևաբար, երբ պատկերի սենսորը ընտրում է օբյեկտիվ, այն կարող է պատկերի սենսոր արտադրողից և օբյեկտիվի արտադրողից խնդրել CRA կոր համապատասխանեցնելու համար։ Ընդհանուր առմամբ խորհուրդ է տրվում, որ պատկերի սենսորի և օբյեկտիվի միջև CRA անկյան տարբերությունը կարգավորվի +/-3 աստիճանի սահմաններում, իհարկե, որքան փոքր է պիքսելը, այնքան բարձր է պահանջը։
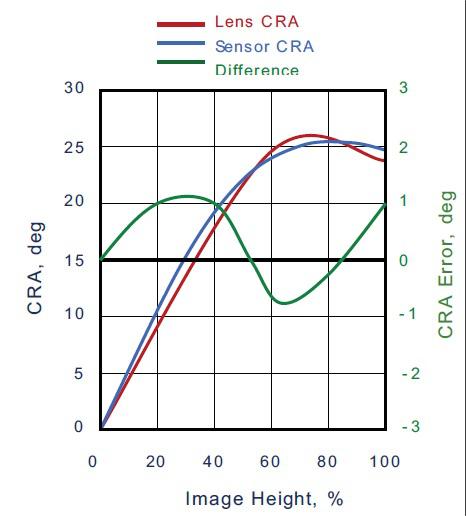
Լինզայի CRA-ի և սենսորի CRA-ի անհամապատասխանության հետևանքները.
Անհամապատասխանությունը հանգեցնում է խաչաձև խոսակցության, որը հանգեցնում է գույների անհավասարակշռության ամբողջ պատկերում, ինչը հանգեցնում է ազդանշան-աղմուկ հարաբերակցության (SNR) նվազմանը, քանի որ CCM-ը պահանջում է թվային ուժեղացման ավելացում՝ ֆոտոդիոդում ազդանշանի կորուստը փոխհատուցելու համար։
Լինզայի CRA-ի և սենսորի CRA-ի անհամապատասխանության հետևանքները
Եթե CRA-ն չհամապատասխանի, դա կառաջացնի խնդիրներ, ինչպիսիք են՝ պատկերների մշուշոտությունը, մառախուղը, ցածր կոնտրաստը, գունաթափված գույները և դաշտի խորության նվազումը։
Լինզայի CRA-ն ավելի փոքր է, քան Պատկերի Սենսորի CRA-ն կստեղծի գունային ստվերագծում։
Եթե պատկերի սենսորը փոքր է օբյեկտիվի CRA-ից, ապա կառաջանա օբյեկտիվի ստվերաներկ։
Այսպիսով, մենք նախ պետք է համոզվենք, որ գունային ստվերագծումը չի երևում, քանի որ Lens ստվերագծումն ավելի հեշտ է լուծել վրիպազերծման միջոցով, քան գունային ստվերագծումը։
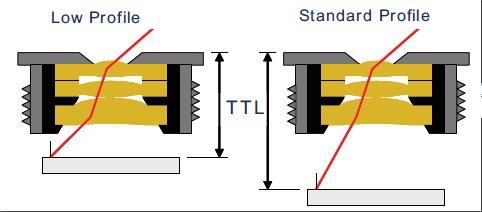
Պատկերի սենսոր և օբյեկտիվ CRA
Վերևում պատկերված նկարից երևում է, որ օբյեկտիվի TTL-ը նաև CRA անկյան որոշման բանալին է։ Որքան ցածր է TTL-ը, այնքան մեծ է CRA անկյունը։ Հետևաբար, փոքր պիքսելներով պատկերի սենսորը նույնպես շատ կարևոր է օբյեկտիվի CRA-ի համապատասխանեցման համար տեսախցիկի համակարգը նախագծելիս։
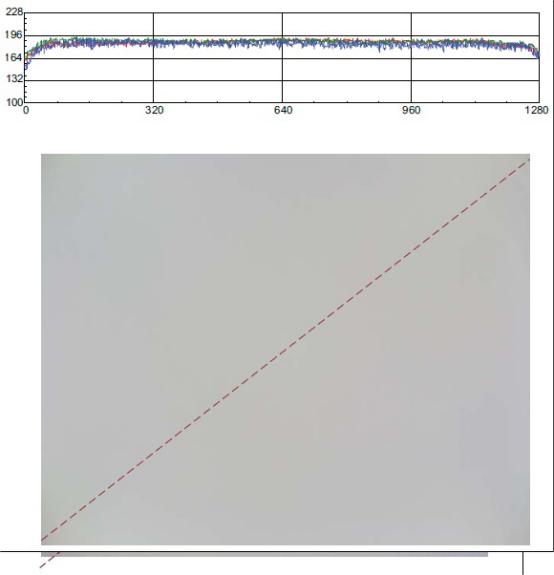
Հաճախ, տարբեր պատճառներով, օբյեկտիվի CRA-ն ճշգրտորեն չի համապատասխանում պատկերի սենսորային CRA-ին: Փորձարարականորեն նկատվել է, որ հարթ գագաթով (նվազագույն շրջում) օբյեկտիվի CRA-ի կորերը ավելի հանդուրժող են տեսախցիկի մոդուլի հավաքման տատանումների նկատմամբ, քան կոր CRA-ները:
Լինզայի CRA-ն տարբեր պատճառներով ճշգրտորեն չի համապատասխանում պատկերի սենսորային CRA-ին։
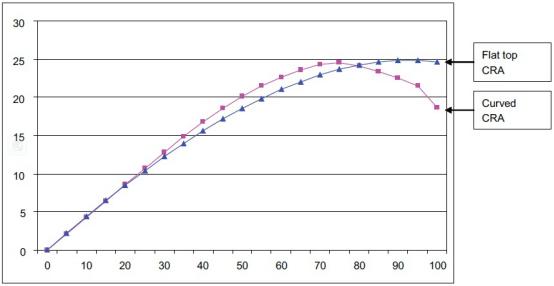
Ստորև բերված պատկերները ցույց են տալիս հարթ և կոր CRA-ների օրինակներ։
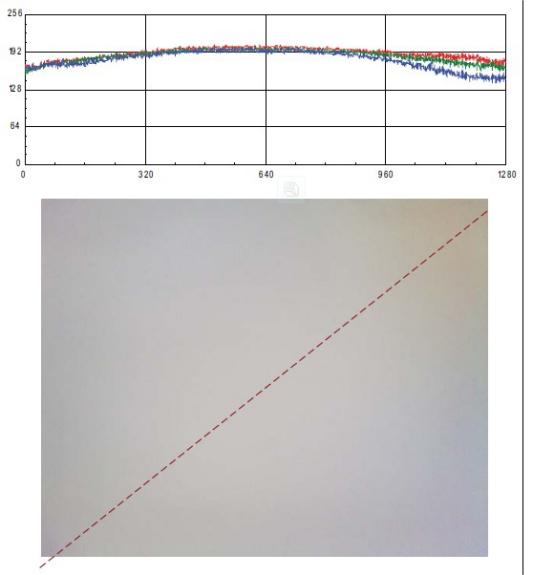
Հարթ և կոր CRA-ների օրինակներ
Եթե օբյեկտիվի CRA-ն չափազանց տարբերվում է պատկերի սենսորի CRA-ից, գունային երանգը կհայտնվի ստորև նկարում ցույց տրվածի պես։
Գույների համադրությունը հայտնվում է
Հրապարակման ժամանակը. Հունվար-05-2023


