Linsens hovedstrålevinkel er vinklen mellem den optiske akse og linsens hovedstråle. Linsens hovedstråle er den stråle, der passerer gennem det optiske systems blændeåbning og linjen mellem indgangspupillens centrum og objektpunktet. Årsagen til eksistensen af CRA i billedsensoren er, at der er et FOV (synsfelt) på mikrolinsen på billedsensorens overflade, og værdien af CRA afhænger af en vandret fejlværdi mellem mikrolinsen på billedsensoren og positionen af siliciumfotodioden. Formålet er at forbedre linsens tilpasning.
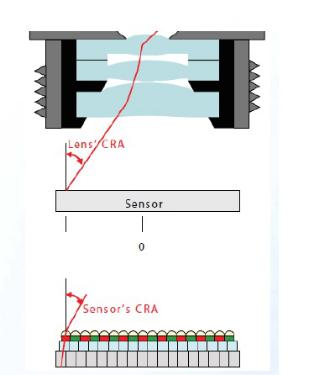
Linsens hovedstrålevinkel
Valg af en matchende CRA eller linse og billedsensor kan sikre en mere præcis optagelse af fotoner i siliciumfotodioder og derved reducere optisk krydstale.
For billedsensorer med små pixels er hovedstrålevinklen blevet en vigtig parameter. Dette skyldes, at lyset skal gå gennem pixelens dybde for at nå siliciumfotodioden i bunden af pixelen, hvilket hjælper med at maksimere mængden af lys, der går direkte ind i fotodioden, og reducerer mængden af lys, der går ind i siliciumfotodioden på en tilstødende pixel (Oprettelse af optisk krydstale).
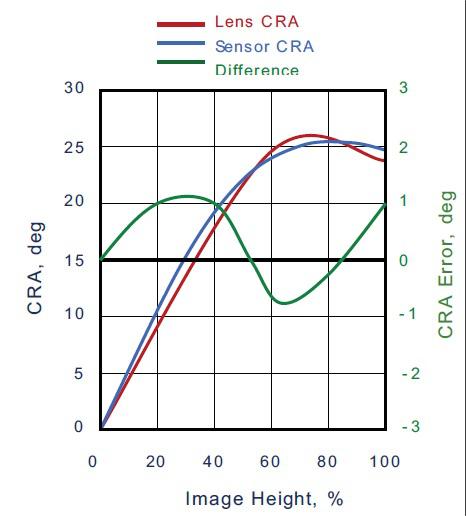
Når en billedsensor derfor vælger et objektiv, kan den bede billedsensorproducenten og objektivproducenten om en CRA-kurve til matchning. Det anbefales generelt, at CRA-vinkelforskellen mellem billedsensoren og objektivet kontrolleres inden for +/- 3 grader. Jo mindre pixel, desto højere er kravet naturligvis.
Effekter af uoverensstemmelse mellem objektiv-CRA og sensor-CRA:
Uoverensstemmelse resulterer i krydstale, hvilket resulterer i farveubalance i hele billedet, hvilket resulterer i en reduktion i signal-støj-forholdet (SNR), da CCM kræver øget digital forstærkning for at kompensere for signaltab i fotodioden.
Effekter af uoverensstemmelse mellem objektiv-CRA og sensor-CRA
Hvis CRA ikke stemmer overens, vil det forårsage problemer såsom slørede billeder, tåge, lav kontrast, falmede farver og reduceret dybdeskarphed.
Linsens CRA er mindre end billedsensorens CRA vil producere farveskygger.
Hvis billedsensoren er mindre end objektivets CRA, vil der opstå linseskygge.
Så vi skal først sikre os, at farveskygger ikke vises, fordi linseskygger er lettere at løse via fejlfinding end farveskygger.
Billedsensor og objektiv CRA
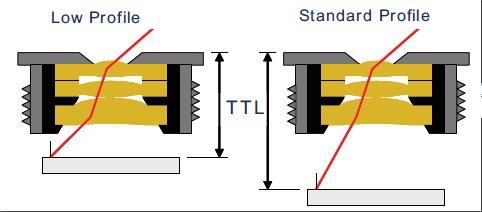
Det fremgår af figuren ovenfor, at objektivets TTL også er nøglen til at bestemme CRA-vinklen. Jo lavere TTL, desto større er CRA-vinklen. Derfor er billedsensoren med små pixels også meget vigtig for objektivets CRA-matchning, når kamerasystemet designes.
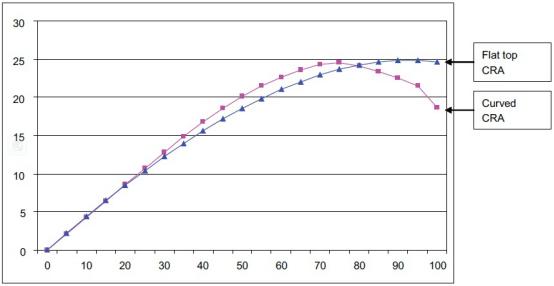
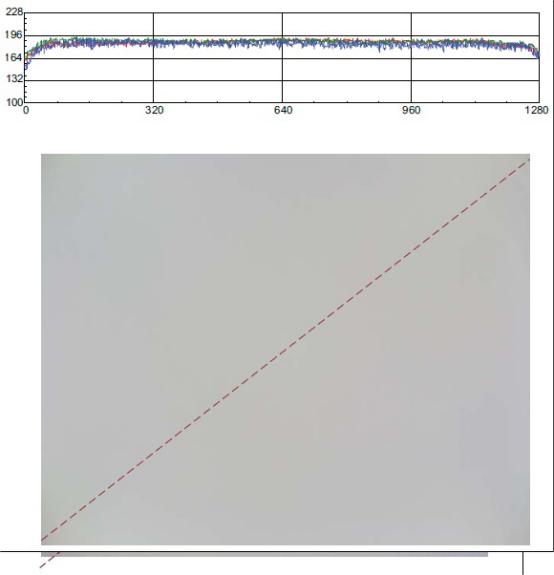
Af forskellige årsager matcher objektivets CRA ofte ikke præcist billedsensorens CRA. Det er eksperimentelt blevet observeret, at objektivets CRA-kurver med en flad top (minimum flip) er mere tolerante over for variationer i kameramodulets samling end buede CRA'er.
Objektivets CRA matcher ikke præcist billedsensorens CRA af forskellige årsager.
Billederne nedenfor viser eksempler på fladtop- og buede CRA'er.
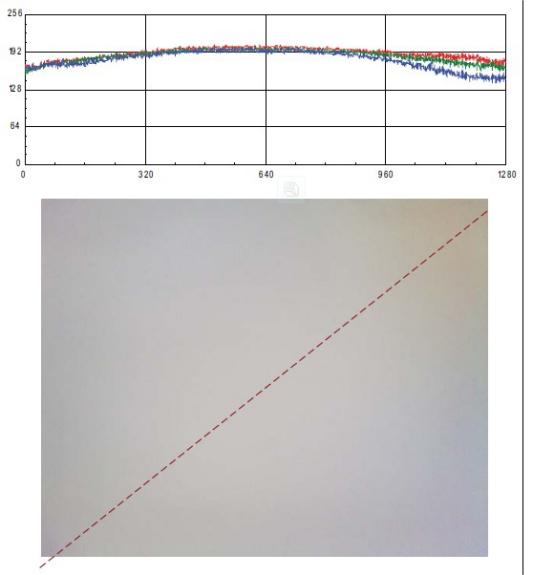
Eksempler på fladtop- og buede CRA'er
Hvis objektivets CRA er for forskellig fra billedsensorens CRA, vil farvestikket se ud som vist på billedet nedenfor.
Farvestikket fremkommer
Opslagstidspunkt: 05. januar 2023


